Components
| Function
|
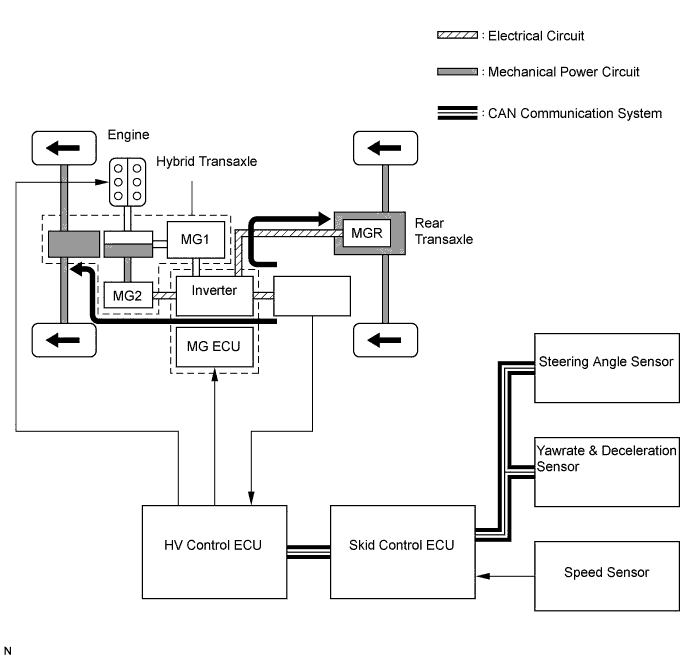
Engine and Hybrid Transaxle
| The motive forces of MG2 that is built into the hybrid transaxle and the engine are combined to drive the front wheels.
|
Rear Transaxle
| The motive force of MGR is built into and transmitted to drive the rear wheels.
|
Skid Control ECU
| - Detects the conditions of the vehicle based on the signals that are input from the sensors and the HV control ECU, calculates the required total motive force and the torque distribution between the front and rear wheels, and transmits the signals to the HV control ECU.
- If the skid control ECU detects a failure in the system, it transmits a request to the HV control ECU to display a AWD warning on the multi-information display in the combination meter assembly.
|
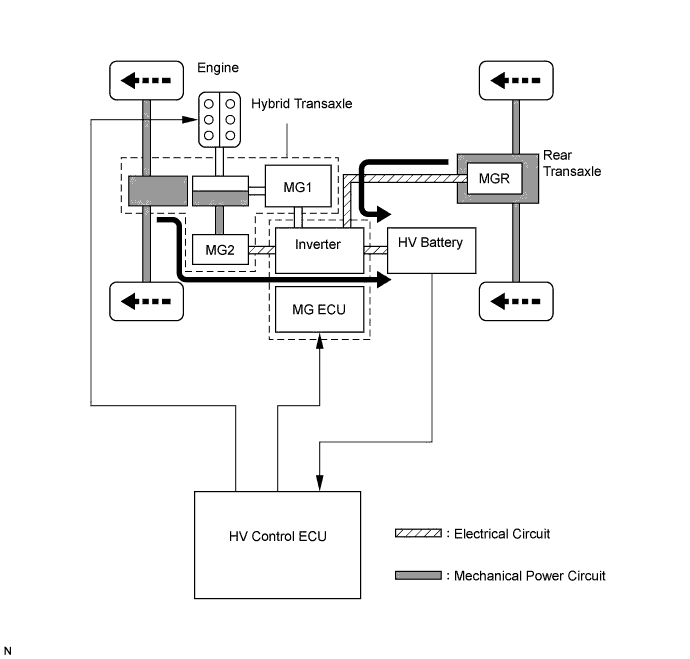
HV Control ECU
| - Calculates the required motive force based on the amount of effort applied to the accelerator pedal by the driver and the signals from the sensors. Then, the HV control ECU transmits the required motive force and the shift position signal to the skid control ECU.
- The HV control ECU controls the engine, MG2, and MGR based on the required total motive force and the torque distribution between the front and rear wheels, which is transmitted by the skid control ECU, in order to appropriately control the motive force.
|
Speed Sensor
(FL, FR, RL, RR)
| Detects the speed of each wheel, and transmits this signal to the skid control ECU.
|
Steering Angle Sensor
| Detects the steering direction and the angle of the steering wheel, and transmits this signal to the skid control ECU.
|
Yawrate & Deceleration Sensor
| Detects the vehicle's acceleration in the forward, rearward, and lateral directions, and sends these signals to the skid control ECU.
|
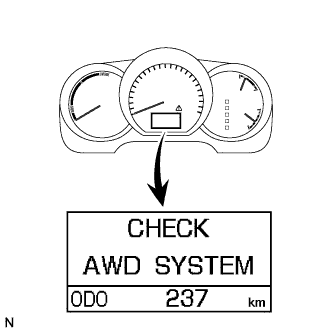
AWD Warning
(Multi-Information Display)
| Displayed on the multi-information display in the combination meter assembly in accordance with the illumination request received from the HV control ECU, in order to inform the driver. At the same time, the master warning light illuminates and the buzzer sounds.
|
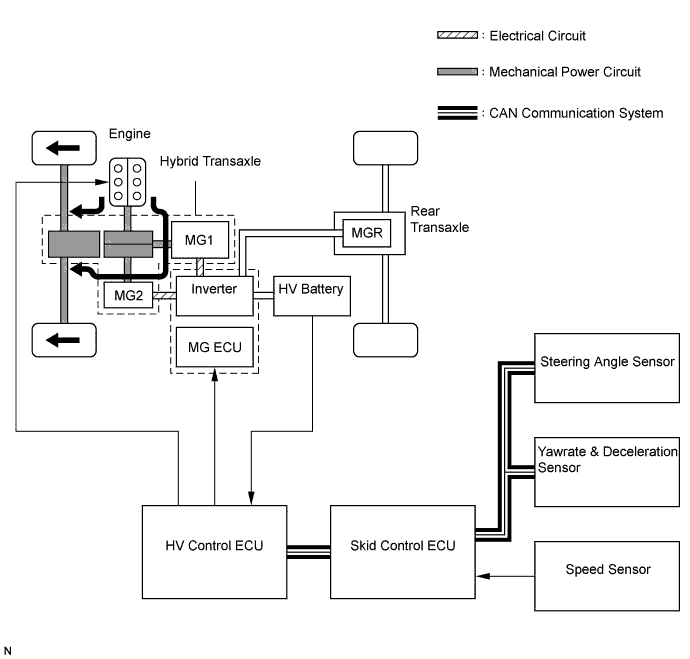
MG1
| Driven by the engine and generates high-voltage electricity in order to operate MG2 or charge the HV battery. Also functions as a starter to start the engine.
|
MG2
| Driven by electrical power from MG1 or the HV battery and generates a motive force for the front wheels.
|
MGR
| Driven by the electrical power from the HV battery and generates a motive force for the rear wheels.
|
Accelerator Pedal Position Sensor
| Converts the accelerator pedal position into an electrical signal and outputs it to the HV control ECU.
|
Inverter Assembly
| Converts the high-voltage DC (HV battery) into AC (MG1 and MG2) and vice versa (Converts AC into DC).
Drops the maximum voltage of DC 288 V into DC12 V in order to supply electricity to body electrical components, as well as to recharge the auxiliary battery (DC 12 V).
|
Park/Neutral Position Switch
| Converts the shift position into an electrical signal and outputs it to the HV control ECU.
|